The powered simple walking model. (a) A hip spring is attached
By A Mystery Man Writer
Description
Gait Based on the Spring-Loaded Inverted Pendulum

Snapshots of the simulated bipedal robot. (A) 0.5 m/s (B) 0.8 m/s (C)

PDF) A powered simple walking model explains the decline in propulsive force and hip flexion torque compensation in human gait
Machines, Free Full-Text

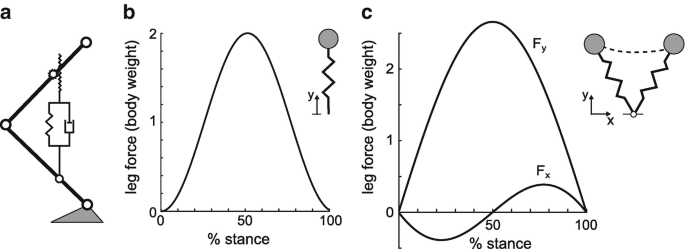
The bipedal spring-mass model. The model has two independent, massless

SLR speeds for walking and running for both experiments. Data points

a) Hip joint angle versus hip joint torque, (b) gait cycle versus hip

Simple spring–mass models can reproduce key features of the dynamics of

The simple bipedal model consists of two rigid legs of length ℓ and

Demographic characteristics of the participant groups in part two of

Orientation of the thigh with filtered gyroscope-X axis reading when
from
per adult (price varies by group size)







